
A drone inspecting a transmission corridor does not fail because its AI model forgot how to classify an obstacle.
It fails because the battery is dropping faster than expected. A motor is pulling more current than normal. Heat is rising inside the enclosure. The radio link is unstable. The nearest charging point is farther away than planned. The mission logic still says “continue,” but the physical system is quietly saying, “not for long.”
That is the gap between AI in a demo and AI in the field.
In real-world autonomous systems, the bottleneck is not only algorithm quality. It is energy. Power, heat, compute, communication, and hardware conditions decide whether intelligence can actually be used when it matters.
This is why health-aware autonomy matters. Autonomous systems software cannot make reliable decisions unless it understands the system’s condition.
AI Fails Differently in Physical Systems
Cloud AI can assume stable power, large compute clusters, high-bandwidth networks, and controlled operating conditions. Physical AI cannot.
Robots, drones, field sensors, industrial systems, and advanced air mobility platforms operate under constraints that change minute-to-minute. They may be battery-powered, off-grid, thermally limited, or disconnected from cloud infrastructure.
A model may be accurate in testing, but accuracy alone does not answer operational questions like:
- Can the system finish the mission safely?
- Should it reduce speed to conserve power?
- Should it hand off a task to another unit?
Should it return, pause, reroute, or degrade gracefully? Those decisions require diagnostics.
The International Energy Agency estimates that data centers consumed about 415 TWh of electricity in 2024, around 1.5% of global electricity use, with demand growing quickly as AI workloads expand. That context matters because many AI systems were designed around abundant compute and energy, not edge execution under field limits.

A drone or field robot operating in a remote outdoor environment, such as a transmission corridor, industrial site, desert, forest, or off-grid inspection route.
The Core Problem: Energy Is the Real Constraint
Most AI discussions still focus on model size, reasoning ability, and benchmark performance. Those are important, but they are incomplete for mission-critical AI.
In the field, every inference has a cost.
Every sensor read, route update, radio message, coordination event, and planning cycle consumes power. More computing creates more heat. More communication drains energy and depends on connectivity. More frequent reasoning may improve responsiveness, but it may also shorten mission life.
This is where AI for real-world operations becomes different from AI in software-only environments.
A system that reasons without health awareness may make locally smart decisions that are operationally wrong. It may choose the fastest route while ignoring battery degradation. It may keep processing high-resolution data when thermal limits suggest a lighter mode. It may wait for cloud confirmation when the link is unreliable.
That is not autonomy. That is dependency with an AI layer on top.
What Health-Aware Autonomy Means
Health-aware autonomy means the system reasons with knowledge of its own operational state.
That includes battery level, power draw, thermal load, compute availability, connectivity, actuator performance, sensor confidence, memory limits, and fleet-level capacity.
For a single device, this enables better decision-making under constraints. For an autonomous fleet, it becomes even more important.
Fleet-scale autonomy requires each unit to understand not only the mission, but also its role within the group. If one drone loses power faster than expected, another may need to take over part of the route. If one ground robot enters a degraded state, the fleet may need to rebalance tasks.
This is where distributed AI systems and collective intelligence AI become practical rather than theoretical.
The system is no longer asking, “What is the best action in the abstract?”
It is asking, “What is the best action this system can safely afford right now?”
Diagnostics Turns Prediction Into Decision-Making
Diagnostics is often treated as a maintenance function. In autonomous systems, it is a reasoning input.
Without diagnostics, AI can predict, classify, and plan. But it cannot fully decide.
A diagnostic layer provides the autonomy stack with context on whether an action is feasible, safe, efficient, or sustainable. It helps convert perception into judgment.
For example, a drone may identify three possible routes:
- The shortest route saves time but increases power draw.
- The safest route avoids obstacles but requires more compute-heavy perception.
- The cooperative route lets another unit handle part of the task but requires communication.
A standard planner might rank these options based on distance, risk, or time. A health-aware autonomy system evaluates them against energy, heat, connectivity, and mission state.
That is the difference between route planning and real decision-making.
Why the Cloud Cannot Be the Default Answer
Cloud connectivity is useful, but it cannot be the foundation for resilient autonomy.
Many field systems operate where networks are intermittent, contested, expensive, or unavailable. Even when the connection exists, latency and bandwidth can limit practical use.
Edge AI decision-making brings reasoning closer to the system. It allows autonomous systems software to operate locally, respond faster, reduce dependence on backhaul communication, and keep functioning when the cloud is unavailable.
Research on TinyML has shown that machine learning inference can run on very low-power devices, including systems operating below 1 mW in some contexts. That does not mean every autonomy problem can run on tiny hardware, but it does show the direction: intelligence must be designed around power budgets, not added after deployment.
The European Data Protection Supervisor also notes that intensive on-device AI can significantly drain batteries, which reinforces the need for low-power AI, efficient models, and careful runtime decisions.
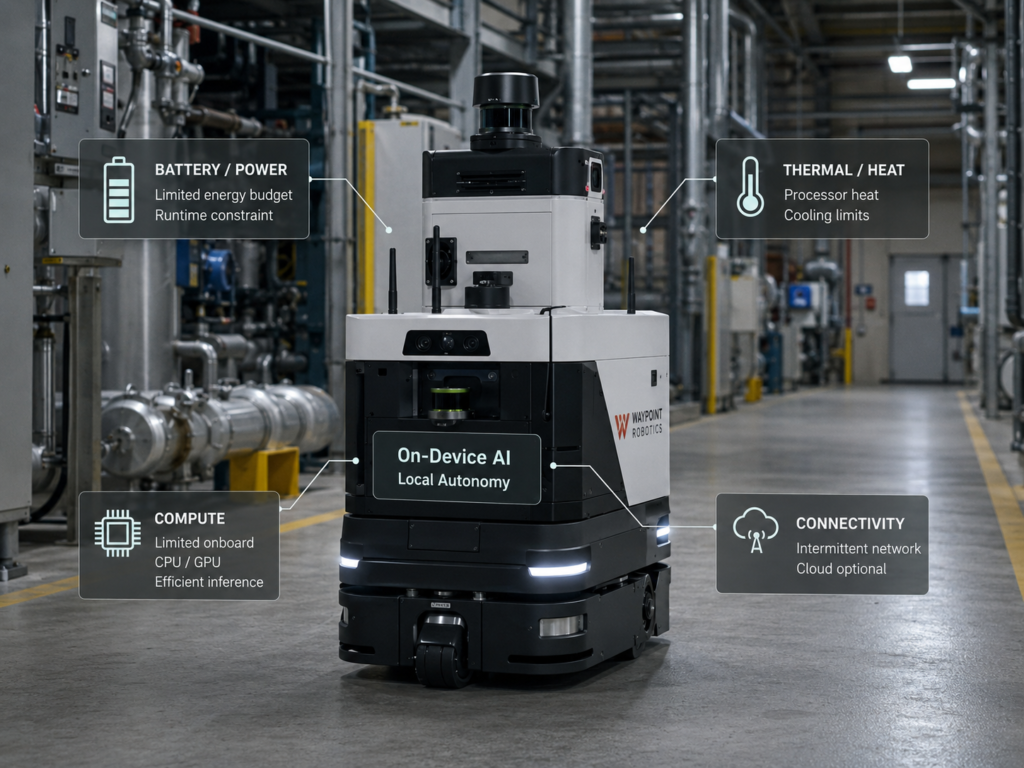
A clean technical-style visual showing battery, heat, compute, and connectivity as constraints around an autonomous system.
Health Awareness at Fleet Scale
A single autonomous system can be health-aware. A fleet must be health-coordinated.
Autonomous fleet management depends on knowing which systems are available, degraded, energy-limited, and best positioned to continue the mission.
This changes how AI autonomy platforms should think about operations.
Instead of assigning tasks only by location or availability, fleet-scale autonomy should account for:
- Battery reserves
- Thermal condition
- Communication quality
- Compute load
- Sensor reliability
- Mission priority
- Recovery options
This is especially important for AI for drones, AI for robotics systems, AI for industrial autonomy, and AI for government and defense systems, where uptime, resilience, and safety matter more than perfect connectivity.
A fleet that understands its own health can adapt before failure. It can shift work, reduce load, preserve critical units, and maintain mission continuity.
That is what reliable AI systems need in the physical world.
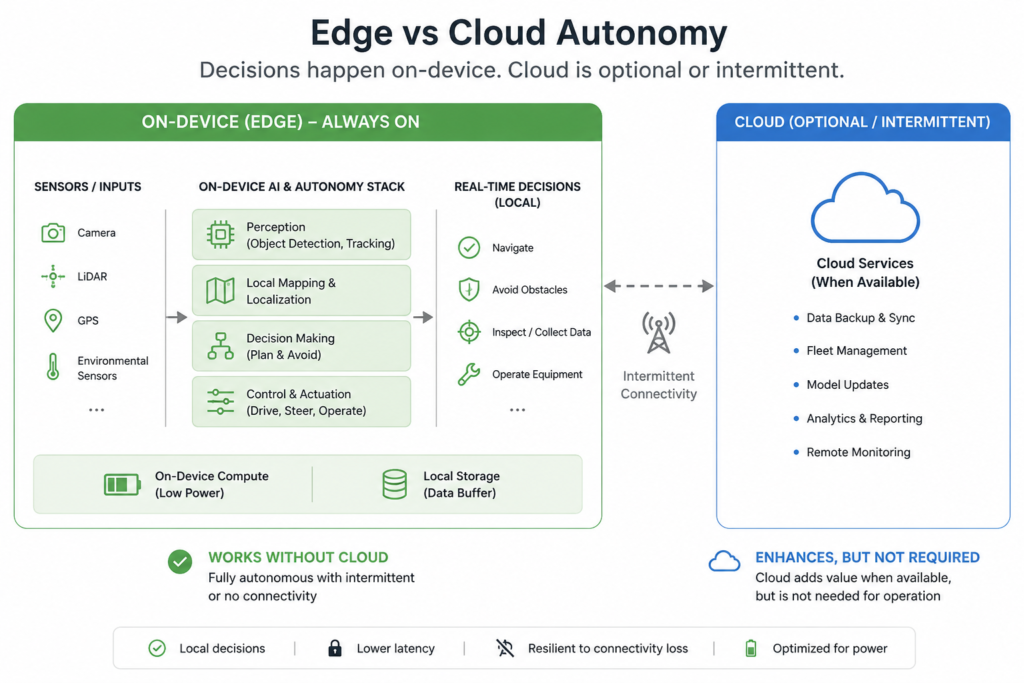
A simple edge-versus-cloud autonomy diagram showing decision-making happening on-device, with the cloud shown as optional or intermittent.
Reinforcement Learning Needs Operational Boundaries
Reinforcement learning is valuable because it enables systems to improve their decisions based on feedback. But in real-world autonomy, learning cannot be separated from constraint.
An autonomous system should not only learn what achieves the objective. It should learn what achieves the objective within the available power, heat, compute, and safety envelope.
This is where health-aware autonomy becomes essential for agentic AI.
Agentic AI in the physical world cannot be judged only by whether it can pursue a goal. It must be judged by whether it can pursue that goal responsibly under changing system conditions.
The more autonomous a system becomes, the more important diagnostics become.
Without health awareness, agentic behavior can become brittle. With health awareness, one can become resilient.
The AstraQua Point of View
AstraQua’s view is that Physical AI needs to be designed for the operating environment, not only the model environment.
Autonomous systems do not need more generic AI hype. They need AI software for autonomy that can reason locally, coordinate across fleets, operate without a cloud connection, and adapt to physical limits.
That means treating energy as a first-class design constraint.
It means diagnostics should inform decisions continuously. It means off-grid AI, on-device AI, and low-power AI are not niche requirements. They are the foundation for mission-critical AI in the real world.
Autonomy Is a Power-Aware Discipline
The future of autonomy will not be won by the largest model alone. It will be won by systems that know when to think, where to think, how much power thinking costs, and what the mission can still afford.
Real autonomy is not just intelligent. It is power-aware, edge-first, fleet-coordinated, and resilient under constraint. That is the standard Physical AI must meet.
To explore how AstraQua Inc approaches agentic Physical AI for real-world autonomous fleets, visit www.astraqua.com.