
Autonomous field robot navigating a remote industrial site with onboard AI and limited battery power
A field robot is sent into a remote industrial site after a storm. Its job is simple on paper: inspect damaged equipment, avoid unstable ground, identify hazards, and return useful data.
But the robot is not operating inside a data center. It has a limited battery, a small onboard processor, changing terrain, degraded sensors, intermittent connectivity, and no guarantee that the cloud will be available when a decision matters.
If the AI model consumes too much power, the mission ends early. If it overheats, performance drops. If it waits for a cloud response before moving, it may freeze at the exact moment it needs to act. That is the real problem Physical AI exists to solve.
Physical AI explained clearly: it is not cloud AI deployed closer to hardware. It is intelligence designed from the start around energy, sensing, actuation, local decision-making, and continuous operation in the physical world.
This distinction matters. Robots, autonomous vehicles, drones, satellites, industrial systems, and field-deployed government platforms do not simply “run AI.” They convert limited energy into perception, motion, communication, and decisions. Every watt has a consequence.
Why Cloud AI Breaks in Physical Systems
Most modern AI has been shaped by cloud assumptions, including abundant compute, centralized infrastructure, stable power, strong cooling, and constant connectivity. Those assumptions do not survive contact with the physical world.
A satellite cannot call a data center every time it needs to prioritize observations. A drone cannot run oversized inference models for half its battery life.
An autonomous vehicle cannot wait for a remote server before reacting to changing road conditions. A defense or disaster-response robot cannot assume bandwidth will be available when operating in a denied or degraded environment.
- Cloud AI is optimized for scale inside infrastructure.
- Physical AI is optimized for action under constraint.
That means the architecture must account for:
1. Power Limits
Battery capacity determines how long a system can sense, think, move, and communicate.
2. Duty Cycles
Many physical systems cannot run all sensors and processors at full intensity all the time. They must decide when to wake, observe, compute, transmit, conserve, and act.
3. Thermal Ceilings
Embedded processors generate heat. Too much computation can cause throttling, instability, or shutdown.
4. Sensor Uncertainty
Cameras, radar, lidar, acoustic sensors, GPS, and environmental inputs degrade in real conditions. Fog, dust, glare, vibration, and interference change the quality of intelligence.
5. Actuation Risk
A software decision becomes a physical movement. Poor timing, bad perception, or delayed response can damage equipment or compromise safety.
6. Connectivity Failure
Remote, mobile, maritime, aerospace, industrial, and government systems often operate in environments with intermittent or denied network access.
A cloud-first architecture treats these as deployment problems.
Physical AI treats them as design requirements.
What Physical AI Actually Means
Physical AI is intelligence designed for systems that sense, decide, move, coordinate, and operate in the real world. It includes on-device inference, edge decision-making, fleet coordination, resilient autonomy, and energy-aware behavior. But it is bigger than Edge AI alone.
Edge AI usually means moving computation closer to the device. Physical AI means designing intelligence around the full operating loop, such as sense, decide, act, conserve, adapt, recover, and continue.
That loop changes the engineering priorities. A cloud AI system may be judged by model accuracy, output quality, or response speed.
A Physical AI system must be judged by mission completion, uptime, power efficiency, safe behavior, degraded-mode performance, and its ability to keep functioning when conditions change.
In other words, the question is not only, “How smart is the model?”
The better question is, “Can this system keep making useful decisions when energy, compute, sensors, and connectivity are limited?”
Energy Is the First Architectural Constraint
In physical systems, energy is not a background detail. It is the budget that every other capability spends from.
Perception consumes energy. Inference consumes energy. Communication consumes energy. Motion consumes energy. Cooling and thermal management consume energy indirectly by limiting what the system can safely do.
This is why AI in real-world operations cannot be built around maximum model size alone.
A larger model with shorter operating time may be less useful than a smaller, optimized model that completes the mission. A drone that processes every frame at full resolution may deliver impressive perception benchmarks but fail to finish its route. A satellite that transmits too much raw data may waste bandwidth and power that should have been reserved for higher-priority decisions.
Physical AI requires energy-aware intelligence.
That can include:
- Running lightweight models for routine perception
- Activating heavier models only when uncertainty rises
- Adjusting sensor sampling rates based on mission phase
- Reducing compute intensity as battery levels drop
- Prioritizing communication for high-value events
- Sharing tasks across a fleet when one unit has less power
- Entering fallback modes without losing mission continuity
This is not just optimization. It is a different design philosophy.
Energy must be part of the decision loop, not something engineers try to fix after deployment.
Why Sensing and Actuation Change the AI Problem
Cloud AI mostly deals with information.
Physical AI deals with consequences.
A chatbot can return a weak answer and recover in the next interaction. A physical system may make a decision that moves a vehicle, changes a flight path, redirects a robot arm, or triggers a fleet-level response.
That makes sensing and actuation central.
A robot must know when its visual input is unreliable. A vehicle must reason through sensor disagreement. A drone must adapt to changes in wind to adjust its energy consumption. A satellite must prioritize onboard processing because downlink windows are limited. An industrial machine must detect when conditions drift outside expected ranges and shift into a safe operating mode.
This is where general AI education often misses the point.
Physical AI is not simply about putting intelligence “at the edge.” It is about connecting intelligence to physical state.
The system must understand, at minimum:
- What it can perceive
- What it cannot perceive clearly
- How much energy remains
- What actions are safe
- What decisions can wait
- What decisions must happen locally
- What happens if communication fails
- How the system should degrade without stopping abruptly
That is why Physical AI architecture must be designed around real operating conditions from the beginning.

Drone fleet inspecting infrastructure in a remote area without reliable cloud connectivity
Fleet Autonomy Makes the Problem Harder
One autonomous system is difficult.
A fleet is a different class of problem.
A fleet of drones surveying infrastructure, a group of warehouse robots, a distributed sensor network, or a constellation of satellites must coordinate under changing conditions. Some units may lose power faster. Some may have better visibility. Some may lose connection. Some may fail.
Cloud-based orchestration assumes reliable bandwidth and centralized control. That works in controlled environments. It becomes fragile when the fleet is operating in the field.
Physical AI supports distributed autonomy by allowing each unit to make local decisions while coordinating with others when possible.
A resilient fleet should be able to:
- Reassign tasks when one unit fails
- Share state without constant cloud dependency
- Balance workload based on battery levels
- Continue operating during partial outages
- Coordinate locally when central control is unavailable
- Learn from field conditions between synchronization windows
The goal is not to eliminate the cloud entirely. The cloud still matters for training, analytics, updates, simulation, and long-term learning.
But the cloud cannot be the nervous system for every operational decision.
In Physical AI, intelligence must live where action happens.
Failure Modes Must Be Designed In
Real autonomy is not proven when everything works. It is proven when something fails.
Physical AI systems must be designed to operate under degraded conditions. That includes low battery states, sensor loss, communication drops, thermal throttling, unexpected terrain, delayed data, and hardware faults.
A physical system should not fail abruptly because one assumption breaks.
It should degrade gracefully.
That may mean slowing down, narrowing its mission, handing off tasks to nearby units, switching to lower-power perception, using simpler fallback policies, or returning to a safe state.
This is where architectural discipline matters. Physical AI cannot rely on a single large model sitting at the center of the system. It needs layered intelligence:
- Efficient local inference
- Energy-aware policies
- Mission-level planning
- Fallback decision trees
- Fleet coordination logic
- Observability across devices
- Secure update and synchronization pathways
The architecture must assume imperfect conditions because the real world guarantees them.
From Cloud AI to Physical AI
The shift from cloud AI to Physical AI is not a small deployment adjustment. It changes the system’s foundation.
- Cloud AI assumes compute abundance.
- Physical AI assumes compute scarcity.
- Cloud AI assumes reliable infrastructure.
- Physical AI assumes interruptions.
- Cloud AI separates intelligence from action.
- Physical AI connects intelligence directly to sensing, motion, power, and operational risk.
- Cloud AI can tolerate latency in many use cases.
- Physical AI often cannot.
- Cloud AI can centralize decision-making.
- Physical AI must distribute agency across devices and fleets.
That is the point of view operators, developers, and autonomy teams need to adopt: Physical AI is not “AI closer to the device.” It is AI designed for the physical limits of the device.
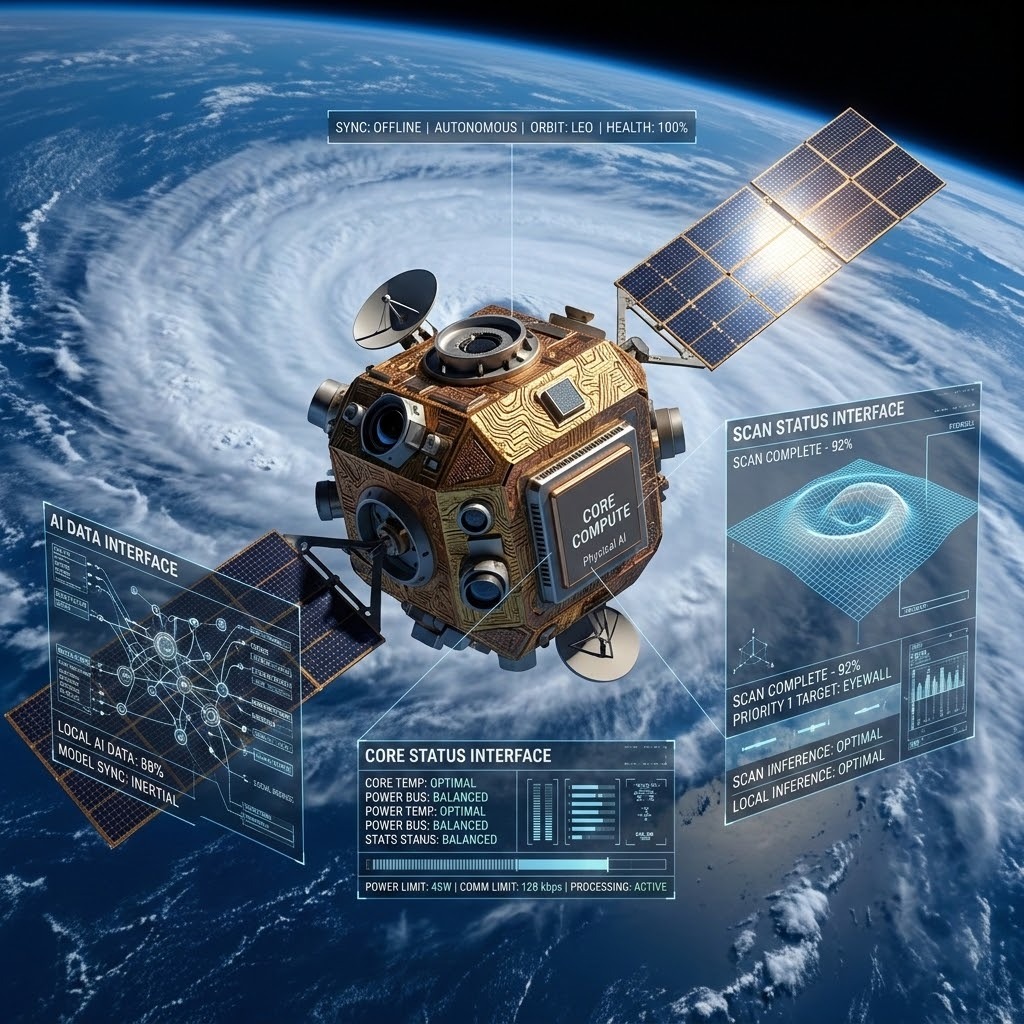
Satellite using Physical AI to process data locally while operating under power and communication limits
The Architecture Has to Change
Physical AI will not scale by copying cloud AI patterns and shrinking them onto embedded hardware.
The assumptions have to change.
Energy must become a first-class design constraint. Sensing must be treated as uncertain and dynamic. Actuation must be designed with safety and consequences in mind. Connectivity must be optional, not mandatory. Fleet coordination must be distributed, not dependent on constant centralized control. Failure modes must be expected, modeled, and handled gracefully.
That is the real future of autonomy.
Robots, vehicles, satellites, drones, and industrial systems do not need AI that only performs well in ideal conditions. They need intelligence that can operate continuously, conserve power, adapt locally, coordinate with other systems, and continue to function when the environment does not cooperate.
At AstraQua Inc., the focus is on agentic Physical AI for autonomous fleets that must operate beyond cloud dependency. The shift is not from cloud to edge alone. It is from centralized intelligence to resilient, energy-aware autonomy built for the real world.
Learn more at www.astraqua.com.